近日,江南(中国)控制科学与工程学院宗广灯教授团队论文“Adaptive practical fixed-time synchronized tracking control of ASV with prescribed performance”在控制领域顶级期刊《Automatica》上发表,DOI: 10.1016/j.automatica.2024.111716。
Automatica 作为IFAC主办的会刊,致力于发表控制理论、设计与应用方面的高水平论文,被公认为国际控制与自动化领域的两大顶级期刊之一,属于中科院Top期刊,具有广泛的学术影响力,影响因子为6.4,是衡量各高校控制领域学术水准的标志性期刊。控制科学与工程学院博士研究生王玉迪为该论文第一作者,宗广灯教授为通讯作者,江南网页版-江南(中国)为第一作者单位和通信作者单位。
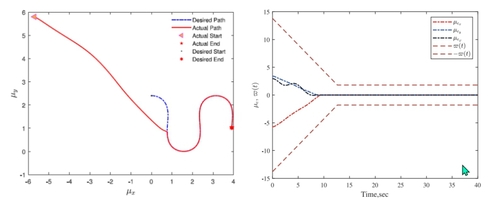
论文针对带有集总干扰的自主水面机器人系统提出了一种基于预设性能的自适应实际固定时间同步跟踪控制算法。利用跟踪误差和归一化符号函数,设计了滑模控制器。为改善系统瞬态与稳态性能,论文设计了基于分段连续有限时间预设性能的自适应同步跟踪控制策略,使跟踪误差同时收敛到原点的邻域内,并且通过仿真验证了控制算法的可行性。
(审稿:控制科学与工程学院 宋丽梅 编辑:党委宣传部 胡敏)
图片来源:控制科学与工程学院

